TOF(飛行時間)LiDAR用のSemiNex製品
トリプルジャンクションレーザーダイオード
FMCW(周波数変調連続波)LiDAR用のSemiNex製品
半導体光増幅器
LIDARとは何ですか?
LIDARという用語は、Light Detection And Ranging(または、誰に尋ねるかによって、「光」と「レーダー」のかばん語)の頭字語です。 LIDARデバイスは、ターゲットをレーザーで照らし、反射光の結果を解釈することによって距離を測定します。これらの距離測定は、オブジェクトのスキャン、速度の測定、広大な地形のマッピング、自律ナビゲーションのための車の周囲のデータの提供など、あらゆる種類のアプリケーションに使用できます。しかし、この素晴らしいテクノロジーはどのように機能しますか?
LIDARはどのように距離を測定しますか?
飛行時間
LIDARはレーザーに依存しており、レーザーは発光します。真空中では、光は光速で移動します。これは基本的に普遍的な速度制限であり、299,792,458 m / sでクロックインします(ただし、空中では少し遅く移動します)。 LIDARは、光速を使用して、飛行時間(TOF)と呼ばれる方法でオブジェクトの距離を決定できます。 TOFを使用するLIDARシステムが、通常はパルスレーザーダイオードから発光すると、内部クロックが開始されます。この光のパルスは、ほぼ光速で物体までの距離を移動し、物体と接触します。光の一部は物体に当たって跳ね返り、ほぼ光速でLIDARシステムに向かって戻り、そこで光検出器に当たります。光が光検出器に当たると、パルスが放出されたときに開始した時計に停止するように指示します。光がどれだけ速く移動したか、およびシステムとオブジェクトの間の距離を2回移動するのにかかった時間がわかっているので、次の式を使用してオブジェクトまでの距離を見つけることができます。
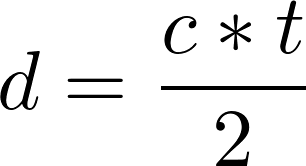
この方程式では NS オブジェクトまでの距離です。 NS は光速であり、 NS 光が放出されてから検出されるまでの時間です。距離を測定するには、タイミングメカニズムが非常に高速である必要があります。たとえば、サッカー場の全長109メートル離れた場所にオブジェクトがある場合、約7.27 * 10かかります。-7 光がそこに行き来するのに数秒。
位相シフト
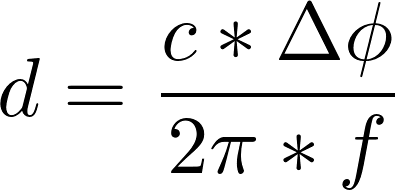
距離を決定するために使用される別の方法は、位相シフト法です。パルスレーザー光源を使用する代わりに、パワーが一定の周波数で変調される連続光源が使用されます。これは、入力がx軸に時間、y軸にレーザー出力がある正弦曲線のように見えることを意味します。光検出器は、光があるかどうかを検出するだけでなく、光のパワーも検出できるため、戻り信号の正弦曲線を形成できます。位相差、波のピークのラジアンの差を比較することにより、オブジェクトまでの距離は次の式で求めることができます。 NS 距離です、 NS 光速です、 Δϕ は位相差であり、 NS は、電力が変調された周波数です。
地図を作る
静止ライダーシステム
距離データだけでも、レーザーが向けられているスポットの距離を返すだけの距離計などに非常に役立ちます。この基本概念をさらに拡張することで、LIDARシステムの距離計を使用して点群を作成することができます。これは、名前が示すように、点群であり、各点は(x、y、z)座標系の位置を表します。レーザーと光検出器が三脚に取り付けられている基本的な固定地上システムを見て、これを説明しましょう。地面がx軸とy軸を含む平面である場合、z軸は地面に垂直な方向であり、ポイントの標高を表します。システムはz軸を中心に回転し、一連のパルスを放出して、レーザーが指している各スポットの距離を迅速に測定します。ここで、レーザーと光検出器のペアをさらに追加し、それらを地面に対して異なる角度に向けて配置すると、水平方向の視野は360度になりますが、垂直方向の視野を広げることができます。データが収集されたときにレーザーが指している距離、場所、角度を知ることにより、(x、y、z)座標系で点を確立できます。システムは数十万のポイントを収集でき、このデータを使用して、さまざまな用途を持つ周囲の世界の3Dマップを作成できます。
LIDARシステムの移動
静止していないLIDARシステムはたくさんあります。優れた例は、自動運転車で使用されるLIDAR車両です。これらのLIDARシステムは車に搭載され、回転して車の周囲のデータを収集します。静止システムとは異なり、車は動いているため、基準座標系は一定ではありません。静止システムとまったく同じように機能し、周囲のマップを作成するだけの、より基本的なシステムを使用できます。ただし、このマップは、変化する環境を反映するために常に更新する必要があります。これは、近接センサーのように機能し、オブジェクトが近くにあることをシステムに通知します。車の動きを考慮してより正確な点群を作成する、より複雑なシステムを作成できます。システムの場所に基づいて座標系を確立するのではなく、実際の地理座標に基づいています。これらのより複雑なシステムは、GNSS(Global Navigation Satellite System)受信機を使用して、車が世界のどこにあるかを確立します。慣性計測装置(IMU)を車に取り付けることができます。これは、車が道路の凹凸を乗り越えるなど、わずかな位置の変化を検出できるデバイスです。 IMUとGPSからの情報を関連付けることで、システムはその位置をさらに正確に理解できます。その位置データをLIDARシステムから収集されたものと組み合わせることにより、点群を長距離にわたって生成できます。
LIDARのアプリケーション
自動運転車

ほとんどの自動運転車はLIDARを使用しています。 LIDARが作成するポイントクラウドは、車両が障害物を検出してナビゲートできるようにする複雑なアルゴリズムで使用されます。フラッシュや定常状態などの新しいタイプのLIDARが開発されている間、ほとんどの場合、360度の視野を得るためにヘッドが回転するLIDARシステムを使用します。点群の精度は、回転速度、パルス速度、レーザーの幅など、さまざまな要因に基づいています。自動運転車は主に軍用および民間のデモに含まれていますが、現在、より実現可能な消費者向け自動運転車が、一部の大手自動車メーカー、大学、およびその他のフォーチュン500企業によって調査されています。
軍隊
軍は、自動化されたターゲット識別、空中レーザー地雷検出システム、および生物兵器のスタンドオフ検出にLIDARテクノロジーを使用しています。 LIDARを使用すると、軍はより長い波長を使用するオプションがあり、暗視ゴーグルで機器を検出できなくなります。 LIDARは、軍の自動運転車でも大きな役割を果たしています。軍隊は、自律型オフロード車を利用して、物資を偵察し、運びます。

気象学

近年、風速と風向を検出するための気象学におけるLIDARの市場が拡大しています。エンジニアは、1450〜1470 nmの領域でIRレーザーを使用して、風速と風向の変化を検出できます。風力発電所は、発電を最適化するために迎え角と方向を調整することができます。風力発電所の開発会社は、LIDARを使用して、発電に理想的であると考えられる強風の領域をマッピングします。これらのマップは、計画エンジニアに個々の風車の理想的な場所を提供します。
その他のアプリケーション
LIDARには、他にもさまざまな興味深いアプリケーションがあります。最近、 LIDARは、考古学者がいくつかの中世の都市を発見するのを支援しました それは林床の下に隠されていました。科学者は、空中LIDARテクノロジーを使用して、森の新しい領域をスキャンしてマッピングし、風景の3D点群を作成して、土地をよりはっきりと見ることができるようにしました。この技術は、歴史家にアジアからカンボジア、南アメリカまでの古代文明の新しい見方を与えました。
SemiNexは、LIDAR用の幅広いレーザーデバイスを提供しています。特定の製品を見つけるには、 商品ページ また セールスアソシエイトと話す.
参考文献