用于 TOF(飞行时间)激光雷达的 SemiNex 产品
三结激光二极管
SemiNex FMCW(调频连续波)激光雷达产品
半导体光放大器
什么是激光雷达?
术语 LIDAR 是 Light Detection And Ranging 的首字母缩写词(或“光”和“雷达”的混合词,取决于您问谁)。 LIDAR 设备通过用激光照射目标并解释反射光的结果来测量距离。这些距离测量可用于各种应用,例如扫描物体、测量速度、绘制大面积地形图、为自动导航提供汽车周围环境数据等等。但是这项奇妙的技术是如何运作的呢?
激光雷达如何测量距离?
飞行时间
LIDAR 依赖于激光,而激光会发光。在真空中,光以光速传播。这基本上是通用速度限制,时钟速度为 299,792,458 m/s(尽管在空中速度稍慢)。 LIDAR 可以使用光速以一种称为飞行时间 (TOF) 的方法来确定物体的距离。当使用 TOF 的 LIDAR 系统发光时,通常来自脉冲激光二极管,它将启动一个内部时钟。这种光脉冲将以接近光速的速度传播到物体的距离,并与之接触。一些光会从物体上反弹,并以接近光速的速度返回激光雷达系统,在那里它会击中光电探测器。当光线照射到光电探测器时,它会告诉从脉冲发出时开始的时钟停止。因为我们知道光行进的速度有多快,以及两次穿越系统和物体之间的距离所花费的时间,所以我们可以使用下面的公式找到到物体的距离。
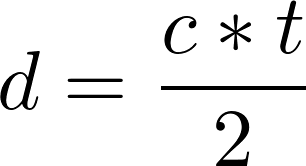
在这个方程中 d 是到物体的距离, C 是光速,而 Ť 是从发光到被检测到的时间。为了测量距离,计时机制必须非常快。例如,如果在一个全长足球场外有一个物体,109 米,大约需要 7.27*10-7 几秒钟让光到达那里和回来。
相移
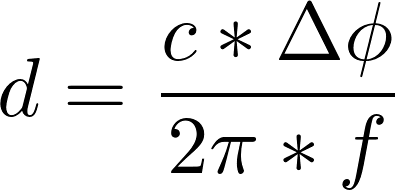
另一种用于确定距离的方法是相移法。不使用脉冲激光源,而是使用连续源,其中以恒定频率调制功率。这意味着输入可以看作是一条正弦曲线,x 轴为时间,y 轴为激光功率。光电探测器不仅可以检测是否有光,还可以检测光的功率,从而形成返回信号的正弦曲线。通过比较相位差,波峰的弧度差,到物体的距离可以用下面的方程找到,其中 d 是距离, C 是光速, Δφ 是相位差,并且 F 是功率调制的频率。
制作地图
固定式激光雷达系统
单独而言,距离数据对于诸如仅返回激光指向的光点距离的测距仪等非常有用。通过采用这个基本概念并进一步扩展它,我们能够在 LIDAR 系统中使用测距仪来制作点云。顾名思义,这是一组点,其中每个点代表 (x,y,z) 坐标系中的一个位置。让我们通过查看一个基本的固定地面系统来解释这一点,其中激光器和光电探测器安装在三脚架上。如果地面是包含 x 轴和 y 轴的平面,则 z 轴将是垂直于地面的方向,并表示点的高程。该系统将围绕 z 轴旋转,并发出一系列脉冲,快速测量激光指向的每个点的距离。现在,如果您添加更多对激光器和光电探测器并将它们放置在相对于地面的不同角度,您仍将拥有 360 度的水平视野,但您将能够增加垂直视野。通过了解距离、收集数据时激光指向的位置和角度,可以在 (x,y,z) 坐标系中建立一个点。该系统可以收集数十万个点,并使用这些数据构建具有多种用途的周围世界的 3D 地图。
移动激光雷达系统
有许多 LIDAR 系统不是静止的。一个很好的例子是自动驾驶汽车使用的激光雷达车辆。这些激光雷达系统安装在汽车上并旋转,收集汽车周围环境的数据。与静止系统不同,汽车在移动,因此参考系不是恒定的。可以使用更基本的系统,它们的工作方式与固定系统完全相同,只需构建其周围环境的地图。尽管如此,这张地图需要不断更新以反映其不断变化的环境。这有点像接近传感器,并在物体靠近时告诉系统。可以制作更复杂的系统,将汽车的运动考虑在内,以制作更准确的点云。它不是基于系统的位置建立坐标系,而是基于实际的地理坐标。这些更复杂的系统将使用 GNSS(全球导航卫星系统)接收器来确定汽车在世界上的位置。惯性测量单元 (IMU) 可以连接到汽车上,这是一种可以检测位置细微变化的设备,例如汽车驶过路面颠簸时的轻微变化。将来自 IMU 和 GPS 的信息关联起来,使系统能够更准确地了解其位置。通过将其位置数据与从 LIDAR 系统收集的数据相结合,可以远距离生成点云。
激光雷达的应用
自动驾驶汽车

大多数自动驾驶汽车使用激光雷达。激光雷达制造的点云用于复杂的算法,使车辆能够检测并绕过障碍物。虽然正在开发新型 LIDAR,例如 Flash 和稳态,但大多数使用的是头部旋转的 LIDAR 系统,以获得 360 度的视野。点云的精度取决于多种因素,例如转速、脉冲速率和激光器的宽度。自动驾驶汽车主要用于军事和私人示范,但目前一些大型汽车制造商、大学和其他财富 500 强公司正在研究更可行的消费级自动驾驶汽车。
军队
军方使用激光雷达技术进行自动目标识别、机载激光地雷探测系统以及对生物战剂的防区外探测。有了激光雷达,军方可以选择使用更长的波长,因此夜视镜无法检测到他们的设备。激光雷达在军队的自动驾驶汽车中也发挥着重要作用。军方利用自动越野车来侦察和运送物资。

气象

近年来,用于风速和方向检测的气象学中的 LIDAR 市场不断增长。使用 1450 至 1470 nm 区域的红外激光器,工程师能够检测风速和风向的变化。风电场然后能够调整迎角和方向以优化电力生产。风电场开发公司还使用激光雷达绘制被认为适合发电的强风区域。这些地图为规划工程师提供了每个单独风车的理想位置。
其他应用
激光雷达还有各种其他有趣的应用。最近, 激光雷达帮助考古学家发现了几个中世纪城市 隐藏在森林地底下。科学家使用机载激光雷达技术扫描和绘制森林的新区域,并创建景观的 3D 点云,使他们能够更清楚地看到土地。这项技术让历史学家对从亚洲到柬埔寨再到南美洲的古代文明有了新的看法。
SemiNex 提供范围广泛的激光设备用于 LIDAR。要查找特定产品,请访问我们的 产品页面 或者 与销售助理交谈.
进一步阅读