SemiNex Products for TOF (Time-of-Flight) LiDAR
Triple Junction Laser Diodes
SemiNex Products for FMCW (Frequency Modulated Continuous Wave) LiDAR
Semiconductor Optical Amplifiers
WHAT IS LIDAR?
The term LIDAR is an acronym for Light Detection And Ranging (or a portmanteau of “light” and “radar,” depending who you ask). LIDAR devices measure distances by illuminating a target with a laser and interpreting the results from the reflected light. These distance measurements can be used for all sorts of applications such as scanning objects, measuring speed, mapping large expanses of terrain, providing data on a car’s surroundings for autonomous navigation, and much more. But how does this fantastic technology work?
HOW DOES LIDAR MEASURE DISTANCE?
TIME OF FLIGHT
LIDAR relies on lasers, and lasers emit light. In a vacuum, light travel at the speed of light. This is basically the universal speed limit, and clocks in at 299,792,458 m/s (though in air it travels a little bit slower). LIDAR can use the speed of light to determine the distance of objects in a method called time of flight (TOF). When a LIDAR system using TOF emits light, typically from a pulsed laser diode, it will start an internal clock. This pulse of light will travel the distance to an object at nearly the speed of light, which it will make contact with. Some of the light will bounce off the object, and travel back towards the LIDAR system at nearly the speed of light, where it will hit a photodetector. When the light hits the photodetector, it tells the clock that started when the pulse was emitted to stop. Because we know how fast the light traveled, and the time it took to travel the distance between the system and the object twice, we can find distance to the object using the equation below.
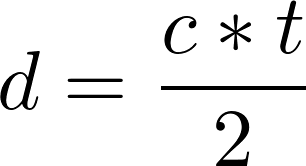
In this equation d is the distance to the object, c is the speed of light, and t is the time between the light being emitting and it being detected. In order for distance to be measured, the timing mechanism has to be really fast. For example, if there were an object a full length football field away, 109 meters, it would take about 7.27*10-7 seconds for the light to get there and back.
PHASE SHIFT
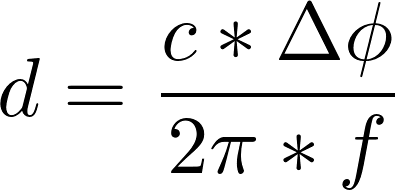
Another method used to determine distance is the Phase-Shift Method. Instead of using a pulsed laser source, a continuous source is used where the power is modulated at a constant frequency. This means that the input can be looked at like a sine curve with time on the x-axis and laser power on the y-axis. Photodetectors can do more than just detect if there is light, it can also detect the power of light, thus a sine curve of the return signal can be formed. By comparing the phase difference, the difference in radians of the peaks of the waves, the distance to the object can be found with the following equation where d is distance, c is the speed of light, Δϕ is the phase difference, and f is the frequency at which the power was modulated.
MAKING A MAP
STATIONARY LIDAR SYSTEMS
Alone, the distance data is very useful to things such as rangefinders that simply return the distance of the spot the laser is pointed. By taking this basic concept and expanding it further, we are able to use rangefinders in LIDAR systems to make point clouds. This is, as the name suggests, a cloud of points, where each point represents a position in an (x,y,z) coordinate system. Let’s explain this by looking at a basic stationary terrestrial system where a laser and photodetector are mounted on a tripod. If the ground was a plane that contains the x-axis and y-axis, then the z-axis would be the direction normal to the ground and would represent the elevation of the point. The system would spin about the z-axis, and would emit a series of pulses, rapidly measuring the distance of each spot the laser was pointing at. Now, if you add more pairs of lasers and photodetectors and place them pointing at different angles relative to the ground, you would still have a 360 degree horizontal field of view, but you would be able to increase the vertical field of view. By knowing the distances, where and at what angle the laser is pointing when the data was collected, a point can be established in the (x,y,z) coordinate system. The system can collect hundreds of thousands of points, and using this data, can construct a 3D map of the world around it that has a variety of uses.
MOVING LIDAR SYSTEMS
There are many LIDAR systems that are not stationary. A great example is the LIDAR vehicles used by autonomous-vehicles. These LIDAR systems are mounted on a car, and spin, collecting data on the car’s surroundings. Unlike a stationary system, the car is moving, so the frame of reference is not constant. More basic systems can be used which work exactly like a stationary system, and simply build a map of its surroundings. Though, this map needs to constantly be updated to reflect its changing surroundings. This would work somewhat like a proximity sensor, and tell the system when objects were near. More complicated systems can be made that take into account the movement of the car to make more accurate point clouds. Rather than establishing a coordinate system based on the location of the system, it is based on actual geographical coordinates. These more complicated systems would use a GNSS (Global Navigation Satellite System) receiver to establish where in the world the car was. An inertial measurement unit (IMU) can be attached to the car which is a device that can detect slight changes in position, such as from the car driving over bumps on the road. Relating the info from the IMU and GPS gives the system an even more accurate understanding of its location. By combining its position data with what is collected from the LIDAR system, a point cloud can be generate over long distances.
APPLICATIONS OF LIDAR
AUTONOMOUS VEHICLES

Most Autonomous Vehicles use LIDAR. The point cloud that LIDAR makes is used in the complicated algorithms that allow the vehicles to detect and navigate around obstacles. While new types of LIDAR are being developed such as Flash and steady-state, most use a LIDAR system that’s head spins to get a 360 degree field of view. The accuracy of the point cloud is based on a variety of factors, such as the rotational speed, rate of pulse, and width of the lasers. Autonomous vehicles are largely contained to the military and private demonstration, but more feasible consumer autonomous vehicles are currently being investigated by some large automotive manufacturers, universities, and other fortune 500 companies.
MILITARY
The military uses LIDAR technology for automated target identification, the Airborne Laser Mine Detection System, and stand off detection for biological warfare agents. With LIDAR, the military has the option to use longer wavelengths so their equipment is undetectable to night vision goggles. LIDAR also plays a large role in the military’s autonomous vehicles. The military takes advantage of autonomous off road vehicles to scout and carry supplies.

METEOROLOGY

In recent years there is a growing market for LIDAR in Meteorology for wind speed and direction detection. Using IR lasers in the 1450 to 1470 nm region, engineers are able to detect shifts in wind speed and direction. Wind farms are then able to adjust the angle of attack and direction in order to optimize power production. Windfarm development companies also use LIDAR to map areas of intense wind thought to be ideal for generation. These maps provide planning engineers with the ideal location of each individual windmill.
OTHER APPLICATIONS
LIDAR has various other interesting applications. Recently, LIDAR helped archaeologists discover several medieval cities that were hidden beneath the forest floor. Scientists used airborne LIDAR technology to scan and map new areas of the forest and create 3D point clouds of the landscape, allowing them to see the land more clearly. This technology has given historians new views of ancient civilizations from Asia to Cambodia to South America.
SemiNex offers a broad range of laser devices for LIDAR use. To find specific products, visit our product page or talk to a sales associcate.
Further Reading