Produits SemiNex pour LiDAR TOF (Time-of-Flight)
Diodes laser à triple jonction
Produits SemiNex pour LiDAR FMCW (onde continue modulée en fréquence)
Amplificateurs optiques à semi-conducteurs
QU'EST-CE QUE LE LIDAR ?
Le terme LIDAR est un acronyme pour Light Detection And Ranging (ou un portemanteau de «lumière» et de «radar», selon à qui vous demandez). Les appareils LIDAR mesurent les distances en éclairant une cible avec un laser et en interprétant les résultats de la lumière réfléchie. Ces mesures de distance peuvent être utilisées pour toutes sortes d'applications telles que la numérisation d'objets, la mesure de la vitesse, la cartographie de grandes étendues de terrain, la fourniture de données sur l'environnement d'une voiture pour une navigation autonome, et bien plus encore. Mais comment fonctionne cette technologie fantastique ?
COMMENT LE LIDAR MESURE-T-IL LA DISTANCE ?
TEMPS DE VOL
Le LIDAR utilise des lasers et les lasers émettent de la lumière. Dans le vide, la lumière voyage à la vitesse de la lumière. Il s'agit essentiellement de la limite de vitesse universelle, et elle atteint 299 792 458 m/s (bien que dans l'air, elle se déplace un peu plus lentement). Le LIDAR peut utiliser la vitesse de la lumière pour déterminer la distance des objets dans une méthode appelée temps de vol (TOF). Lorsqu'un système LIDAR utilisant le TOF émet de la lumière, généralement à partir d'une diode laser pulsée, il démarre une horloge interne. Cette impulsion de lumière parcourra la distance jusqu'à un objet à presque la vitesse de la lumière avec laquelle elle entrera en contact. Une partie de la lumière rebondira sur l'objet et retournera vers le système LIDAR à presque la vitesse de la lumière, où elle frappera un photodétecteur. Lorsque la lumière frappe le photodétecteur, elle indique à l'horloge qui a commencé lorsque l'impulsion a été émise de s'arrêter. Parce que nous savons à quelle vitesse la lumière a voyagé et le temps qu'il a fallu pour parcourir la distance entre le système et l'objet deux fois, nous pouvons trouver la distance jusqu'à l'objet en utilisant l'équation ci-dessous.
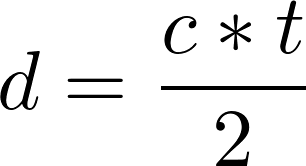
Dans cette équation ré est la distance à l'objet, c est la vitesse de la lumière et t est le temps entre l'émission de la lumière et sa détection. Pour que la distance soit mesurée, le mécanisme de chronométrage doit être très rapide. Par exemple, s'il y avait un objet à un terrain de football sur toute sa longueur, à 109 mètres, cela prendrait environ 7,27 * 10-7 secondes pour que la lumière fasse l'aller-retour.
DÉCALAGE DE PHASE
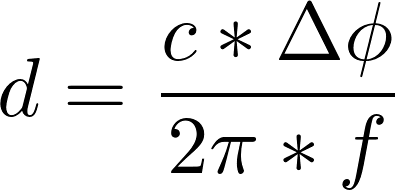
Une autre méthode utilisée pour déterminer la distance est la méthode de décalage de phase. Au lieu d'utiliser une source laser pulsée, une source continue est utilisée où la puissance est modulée à une fréquence constante. Cela signifie que l'entrée peut être considérée comme une courbe sinusoïdale avec le temps sur l'axe x et la puissance laser sur l'axe y. Les photodétecteurs peuvent faire plus que simplement détecter s'il y a de la lumière, ils peuvent également détecter la puissance de la lumière, ainsi une courbe sinusoïdale du signal de retour peut être formée. En comparant la différence de phase, la différence en radians des pics des ondes, la distance à l'objet peut être trouvée avec l'équation suivante où ré est la distance, c est la vitesse de la lumière, ?? est la différence de phase, et F est la fréquence à laquelle la puissance a été modulée.
FAIRE UNE CARTE
SYSTÈMES LIDAR FIXES
Seules, les données de distance sont très utiles pour des choses telles que les télémètres qui renvoient simplement la distance du point vers lequel le laser est pointé. En prenant ce concept de base et en l'étendant davantage, nous sommes en mesure d'utiliser des télémètres dans les systèmes LIDAR pour créer des nuages de points. Il s'agit, comme son nom l'indique, d'un nuage de points, où chaque point représente une position dans un système de coordonnées (x,y,z). Expliquons cela en examinant un système terrestre stationnaire de base où un laser et un photodétecteur sont montés sur un trépied. Si le sol était un plan contenant l'axe des x et l'axe des y, l'axe des z serait la direction normale au sol et représenterait l'élévation du point. Le système tournerait autour de l'axe z et émettrait une série d'impulsions, mesurant rapidement la distance de chaque point vers lequel le laser pointait. Maintenant, si vous ajoutez plus de paires de lasers et de photodétecteurs et que vous les placez à des angles différents par rapport au sol, vous auriez toujours un champ de vision horizontal de 360 degrés, mais vous seriez en mesure d'augmenter le champ de vision vertical. En connaissant les distances, où et à quel angle le laser pointe lorsque les données ont été collectées, un point peut être établi dans le système de coordonnées (x,y,z). Le système peut collecter des centaines de milliers de points et, à l'aide de ces données, peut construire une carte 3D du monde qui l'entoure qui a diverses utilisations.
SYSTÈMES LIDAR MOBILES
Il existe de nombreux systèmes LIDAR qui ne sont pas stationnaires. Un bon exemple est les véhicules LIDAR utilisés par les véhicules autonomes. Ces systèmes LIDAR sont montés sur une voiture et tournent en collectant des données sur l'environnement de la voiture. Contrairement à un système stationnaire, la voiture est en mouvement, donc le cadre de référence n'est pas constant. Des systèmes plus basiques peuvent être utilisés qui fonctionnent exactement comme un système stationnaire, et construisent simplement une carte de son environnement. Cependant, cette carte doit être constamment mise à jour pour refléter son environnement changeant. Cela fonctionnerait un peu comme un capteur de proximité et indiquerait au système quand les objets sont proches. Des systèmes plus complexes peuvent être créés qui prennent en compte le mouvement de la voiture pour créer des nuages de points plus précis. Plutôt que d'établir un système de coordonnées basé sur l'emplacement du système, il est basé sur des coordonnées géographiques réelles. Ces systèmes plus complexes utiliseraient un récepteur GNSS (Global Navigation Satellite System) pour déterminer où se trouvait la voiture dans le monde. Une unité de mesure inertielle (IMU) peut être fixée à la voiture, un dispositif capable de détecter de légers changements de position, par exemple lorsque la voiture passe sur des bosses sur la route. La mise en relation des informations de l'IMU et du GPS donne au système une compréhension encore plus précise de son emplacement. En combinant ses données de position avec celles collectées par le système LIDAR, un nuage de points peut être généré sur de longues distances.
APPLICATIONS DU LIDAR
VÉHICULES AUTONOMES

La plupart des véhicules autonomes utilisent LIDAR. Le nuage de points créé par LIDAR est utilisé dans les algorithmes complexes qui permettent aux véhicules de détecter et de contourner les obstacles. Alors que de nouveaux types de LIDAR sont en cours de développement, tels que Flash et l'état stable, la plupart utilisent un système LIDAR qui tourne la tête pour obtenir un champ de vision de 360 degrés. La précision du nuage de points est basée sur divers facteurs, tels que la vitesse de rotation, la fréquence d'impulsion et la largeur des lasers. Les véhicules autonomes sont en grande partie limités à la démonstration militaire et privée, mais des véhicules autonomes grand public plus réalisables sont actuellement à l'étude par certains grands constructeurs automobiles, universités et autres sociétés Fortune 500.
MILITAIRE
L'armée utilise la technologie LIDAR pour l'identification automatisée des cibles, le système de détection de mines par laser aéroporté et la détection à distance des agents de guerre biologique. Avec LIDAR, les militaires ont la possibilité d'utiliser des longueurs d'onde plus longues afin que leur équipement soit indétectable par les lunettes de vision nocturne. Le LIDAR joue également un rôle important dans les véhicules autonomes de l'armée. L'armée profite de véhicules tout-terrain autonomes pour repérer et transporter des fournitures.

MÉTÉOROLOGIE

Ces dernières années, il y a eu un marché croissant pour le LIDAR en météorologie pour la détection de la vitesse et de la direction du vent. En utilisant des lasers IR dans la région de 1450 à 1470 nm, les ingénieurs sont capables de détecter les changements de vitesse et de direction du vent. Les parcs éoliens sont alors en mesure d'ajuster l'angle d'attaque et la direction afin d'optimiser la production d'électricité. Les sociétés de développement de parcs éoliens utilisent également le LIDAR pour cartographier les zones de vent intense considérées comme idéales pour la production. Ces cartes fournissent aux ingénieurs de planification l'emplacement idéal de chaque éolienne.
AUTRES APPLICATIONS
Le LIDAR a diverses autres applications intéressantes. Récemment, Le LIDAR a aidé les archéologues à découvrir plusieurs cités médiévales qui étaient cachés sous le sol de la forêt. Les scientifiques ont utilisé la technologie LIDAR aéroportée pour numériser et cartographier de nouvelles zones de la forêt et créer des nuages de points 3D du paysage, leur permettant de voir la terre plus clairement. Cette technologie a donné aux historiens une nouvelle vision des civilisations anciennes de l'Asie au Cambodge en passant par l'Amérique du Sud.
SemiNex propose une large gamme de dispositifs laser pour une utilisation LIDAR. Pour trouver des produits spécifiques, visitez notre page produit ou parler à un vendeur.
Lectures complémentaires